20世纪50年代还出现了第一个工业机器人——Unimate。Unimate的专利是由George Devol在1954年提出的,它的特点是一个机械手臂能够运送压铸件并将其焊接到位。
Unimate
这种革命性的装置将永远改变制造业的面貌。
20世纪60年代:工业机器人革命
1961年Devol获得Unimate专利后,机器人在工业环境中的应用进展迅速。同年,通用汽车公司在其位于新泽西州的装配线上安装了Unimate。通用汽车在Unimate上获得成功后,于1966年进入全面生产。
20世纪60年代,Devol的机器人工业部门的核心理念出现了许多创新和扩展。1968年,麻省理工学院人工智能实验室的联合创始人Marvin Minsky发明了一种“触手臂”——一个由液压装置驱动的12节机械手臂,可以通过操纵杆进行控制。Minsky的机器人触手臂很容易就能绕过障碍物。他的研究为今天出现的许多软机器人技术创新铺平了道路。
1969年,Victor Scheinman发明了斯坦福机械臂,这是一个机器人手臂,被认为是最早由电脑控制的机器人之一。

斯坦福机械臂
这是一个巨大的突破,就像当时用磁鼓操作Unimate一样。它包含六个关节点,完全由斯坦福大学人工智能实验室完成。虽然主要用于教育目的,但斯坦福手臂标志着可通过计算机控制的工业机器的重大突破。
20世纪70年代:WABOT-1、工业创新和太空机器人
20世纪70年代初,世界上第一个全面拟人化机器人——WABOT-1问世。WABOT-1是1967年WABOT的后续行动,由东京早稻田大学的加藤一郎(Ichiro Kato)创立。
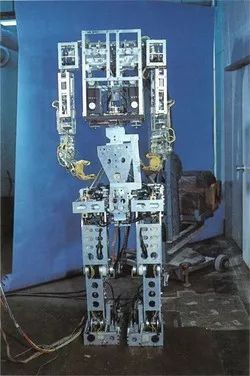
WABOT-1
WABOT-1有一个视觉和肢体控制系统,可以自行导航和自由移动,它甚至可以测量物体之间的距离。它的手具有触觉传感器,这意味着它能抓住和运输物体。它的智力与18个月大的人类相当,标志着人形机器人技术的重大突破。
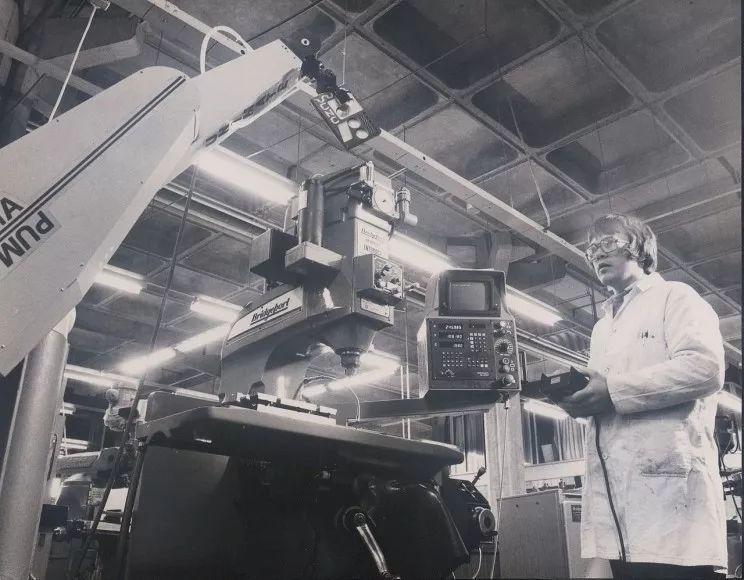
上世纪70年代还见证了工业机器人技术的发展。1973年,德国库卡(KUKA)公司发布了“FAMULUS”——这是第一个拥有6个机电驱动轴的工业机器人。第二年,Richard Hohn开发了第一台由小型计算机提供动力的工业计算机——The Tomorrow Tool(T3)。
1978年,SCARA(the Selective Compliance Assembly Robotic Arm)被创造出来,它由山梨大学(University of Yamanashi )教授Hiroshi Makino开发,手臂可以沿4轴移动,并在80年代早期成为装配线上的常见设备。

SCARA
第一批登陆火星的机器人是维京1号和维京2号,它们于1976年登陆火星。
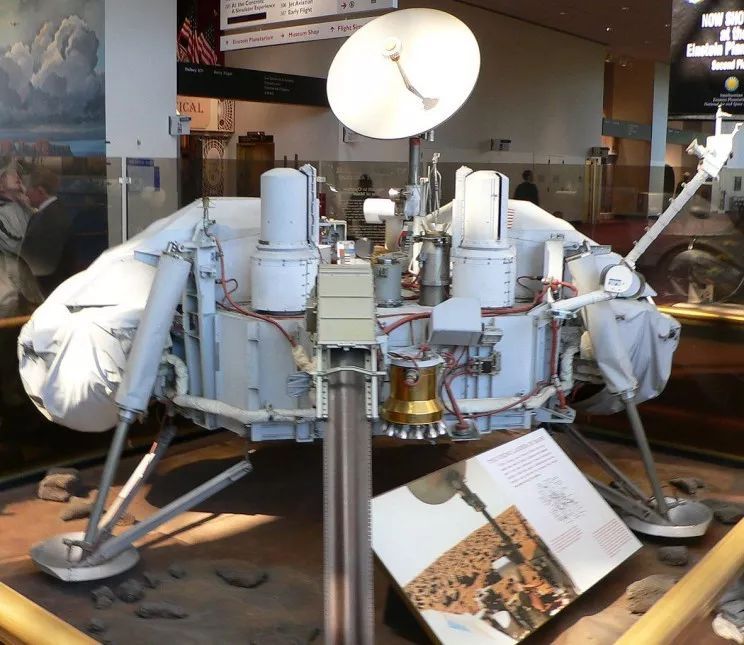
这两个机器人都是由放射性同位素热电供电,这些发电机通过衰变钚释放的热量产生能量。尽管这两个登陆器收集的数据很模糊,但它们是我们今天所知的火星探测器的官方先行者。
20世纪80年代:家庭机器人、加拿大的臂膀和Genghis。
在20世纪80年代,机器人正式进入了主流消费市场,尽管大多是简单的玩具。
其中最受欢迎的机器人玩具是《Omnibot 2000》。Omnibot 2000是遥控的,并配有一个托盘用来供应饮料和零食。

Omnibot 2000
这一时期另一个备受追捧的机器人玩具是任天堂的R.O.B。R.O.B.作为任天堂娱乐系统的一款机器人播放器被推向市场。它可以对6个不同的命令做出响应,这些指令通过CRT屏幕上的闪光灯进行通信。
80年代,工业机器人领域出现了进一步的发展,福特在世界各地的生产线上增加了数百个机器人。福特嘉年华因其由机器人注入防腐密封剂而备受瞩目。
随着1981年哥伦比亚号航天飞机发射Canadarm,机器人在80年代也继续它们的旅程。加拿大制造的机械臂长50英尺(15.2米),有6个连接点。它可以由控制站的一名机组成员控制,在服役期间成功执行了90次任务。
1989年麻省理工学院研究人员制造的六足机器人Genghis,通常被认为是现代历史上最重要的机器人之一。
Genghis
由于其体积小,材料便宜,Genghis被认为缩短了未来空间机器人设计的生产时间和成本。它由12个伺服电机和22个传感器组成,可以穿越岩石地形。
20世纪90年代:Cyberknife,Sojourner和爱宝